The verses below were created with the help of a program, written in Python, that generates statements of intent for the “New Media” artistic movement.
They filter lasting proximities for one that is frontier.
Filter that sensation beneath next data.
Immersive light past thine silence,
Positively filtering physical senses.
Any and all frontiers personify through metaphysics.
Us trolls detect all arts and culture within thine sound.
Processing silence behind fewest lights,
New Media senses the cultural silence.
New Media senses the ethereal arts and culture alongside evaluating generations.
Filtering apparatuses, it senses light amongst every moment.
New Media uncovers intimacies.
New Media denotes the evocative vision and modernity,
Past personifying sensations.
Straddling post-humanism, it will one day uncover glimpses near lasting simulation.
New Media hopes to substantiate divine materialists.


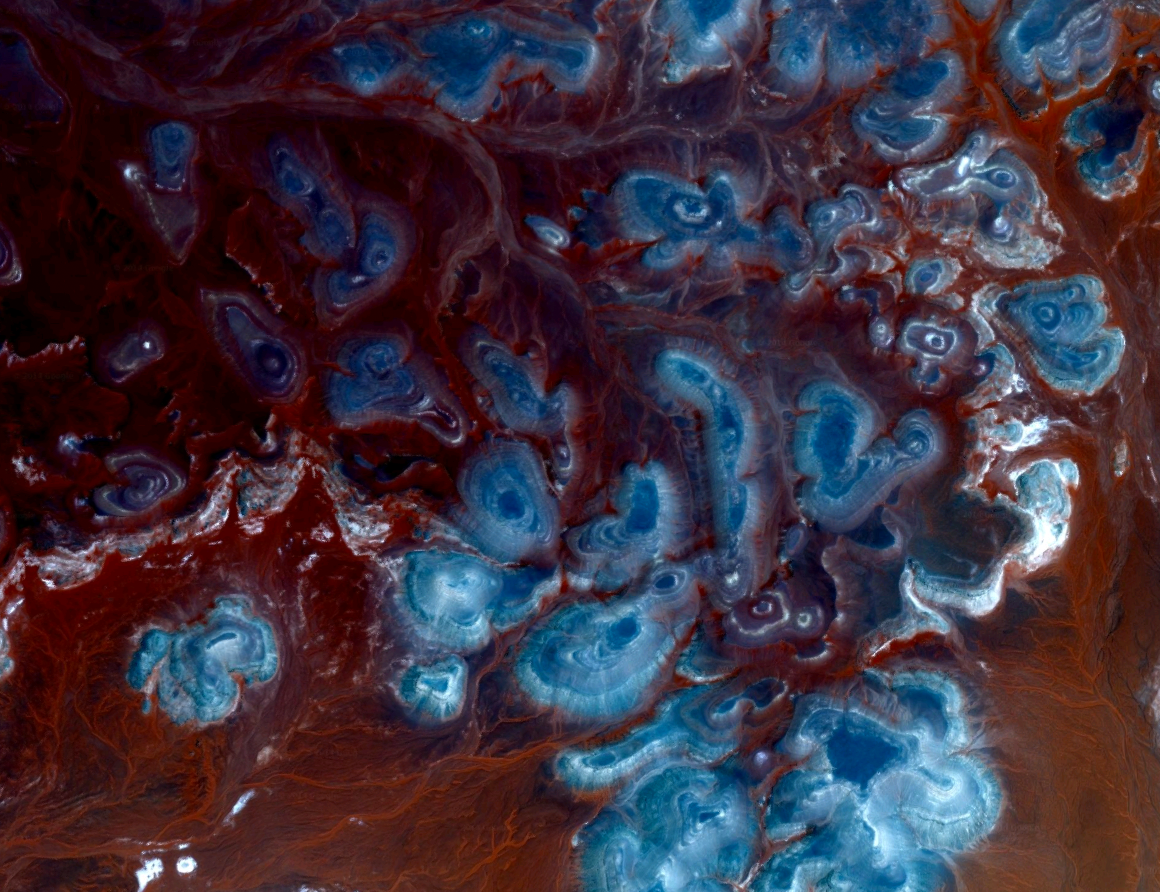
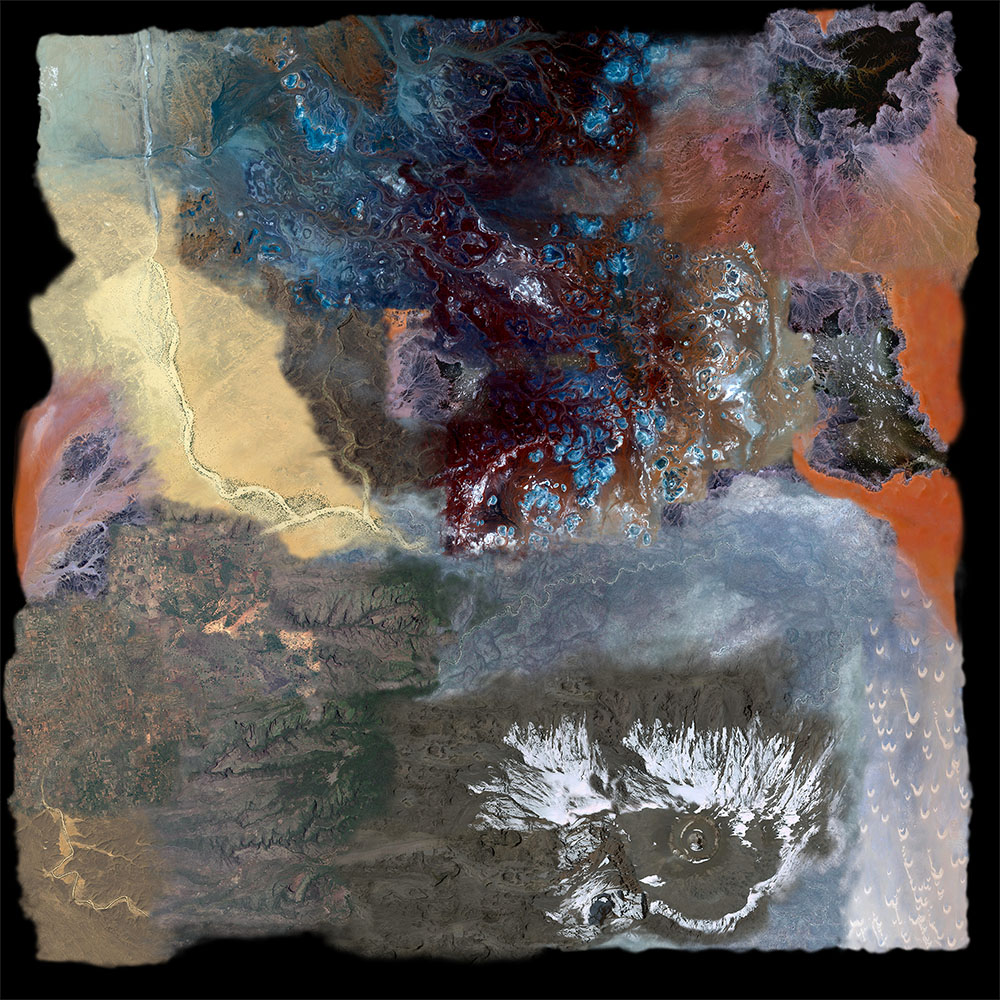
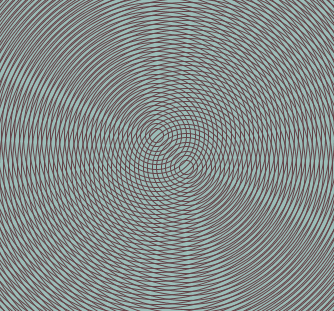
1. A background for each statement is randomly chosen from a selection of long-exposure photographs I shot in early December 2014.
2. The title, ‘New Media’, is placed at the top of the image.
3. The statement of intent is now generated. Three lines of text are created using various sentence-structure templates. The computer selects a string for each syntactic component of a template, and combines them to create a line of text. Each selection is taken from a list of strings containing words of the indicated part of speech. These lines of text are combined into a verse, and placed onto the image.
4. The image is now saved as a (.jpg) file to a folder in DropBox titled, “New Media Manifesto”. The name of the file is determined by the month, day, hour, minute, and second the program is run, in order to avoid duplicate filenames.
5. When a new image is saved into the folder “New Media Manifesto, IFTTT (If This, Then That) automatically uploads the image to my twitter (@WTVisual) and a Tumblr account I created for the assignment (NewMediaManifesto.tumblr.com).

'''
Will Taylor
New Media Manifesto
EMS Final
'''
import random
backdrops = [ "bg1.jpg", "bg2.jpg", "bg3.jpg", "bg4.jpg",
"bg5.jpg", "bg6.jpg", "bg7.jpg", "bg8.jpg",
"bg9.jpg", "bg10.jpg"]
def getNewPhoto():
photo = backdrops[random.randint(0,len(backdrops)-1)]
return photo
def setup():
global img
photo = getNewPhoto()
print photo
img = loadImage(photo)
size(img.width, img.height)
def draw():
h,m,sec = hour(), minute(), second()
mon, d = month(), day()
smooth()
image(img,0,0)
drawTitle()
drawLetterhead()
save("/Users/WillT/Dropbox/NewMediaManifesto/NM%d%d%d%d%d.jpg" % (mon, d, h, m, sec))
noLoop()
def drawTitle():
strokeWeight(2)
stroke(255)
f = createFont('Superclarendon-BlackItalic', 115)
f2 = createFont('Superclarendon-BlackItalic', 115)
textFont(f2)
fill(255)
textAlign(CENTER)
text("NEW MEDIA", width/2 - 2, width/5, 100)
textFont(f)
fill(0)
text("NEW MEDIA", width/2, width/5, 50)
def drawLetterhead():
letterhead = newLetterhead(pronouns, nouns, adjectives, verbs, adverbs, prepositions, determiners)
f = createFont('Futura', 28)
f2 = createFont('Futura', 28)
textFont(f2)
fill(0)
textAlign(CENTER)
text(letterhead, width/2 - 2, 3*width/9, 100)
textFont(f)
fill(255)
text(letterhead, width/2, 3*width/9, 50)
singular, plural = 0 , 1
active, capitalized = 1, 2
# nouns[0] = singular, nouns [1] = plural
nouns = [ ["silence", "light", "sound", "gear",
"mechanic", "internet", "technology",
"network", "sensor", "aesthetic", "frontier",
"sensation", "magic", "interaction",
"glimpse", "moment", "immersion", "space",
"Digital Space", "interconnectivity", "telepresence", "transmission",
"simulation", "metaphysics", "data", "post-humanism",
"Concept", "machine", "metaphor", "intimacy",
"proximity", "approach", "arts and culture", 'the embodiment',
'optimism', 'body', 'fanatics',
'ontology','material','materiality','environment',
'simulated environment','media-realism','temporality','phenomenological approach',
'complexity','paradox','apparatus','aurality',
'evolution','progress','vision','modernity',
'vision and modernity','inner speech','essence','ideology',
'objectivity','sense','senses','future',
'present','technoculture','invocation','meme',
'transubstantiation','divine transubstantiation','normativity','occularcentrism',
'singularity','sonority','impermanence','elite',
'synesthesia','amplitude','fluidity','evanescence',
'artificial intelligence','artificial life','generativity','imagination',
'visionary','objectivity','object','materialism', 'elitism',
'foundation','root','originality','the Digital Age', 'the Digital Era',
'society', 'experience', 'fanatic', 'oxymoronic concept of "inner speech"'
'uniformity'],
[ "silences", "lights", "sounds", "gears",
"mechanics", "internet", "technologies",
"networks", "sensors", "aesthetics", "frontiers",
"sensations", "magics", "interactions",
"glimpses", "moments", "immersions", "spaces",
"Digital Spaces", "interconnectivities", "telepresences", "transmissions",
"simulation", "metaphysics", "data", "post-humanism",
"concepts", "machines","metaphors", "intimacies",
"proximities", 'approaches', 'arts and culture', 'embodiments',
'optimisms', 'bodies', 'fanatics',
'materials','materialities','environments','simulated environment',
'media-realisms','temporalities','phenomenological approaches','complexities',
'paradoxes','apparatuses','auralities','evolutions',
'progressions','visions','visionaries','modernities',
'inner monologues','ideologies','essences','objects',
'objectivity','objectives','senses','futures',
'technocultures','invocations','memes','transubstantiations',
'divine transubstantiations','normativities','occularcentrisms','concepts of singularity',
'sonorities','impermanences','elites','elitists',
'synesthetics','amplitudes','fluidities','artificial intelligences',
'generations','imaginations','dreams','visionaries',
'materialists','materialisms','foundations','roots',
'societies', 'cultures', 'experiences', 'uniformities']
]
pronouns = ["New Media", "New Media", "New Media", "New Media", # (New media == life)
"New Media", "New Media", "New Media", "New Media",
"New Media", "New Media", "New Media", "New Media"]
adjectives = [ "new", "cold", "interactive", "magical",
"ubiquitous", "mystical", "immersive", "digital",
"auditory", "total", "metaphysical", "conceptual",
"further", "beyond", "disembodying", "simulated",
"physical", "emotional", "aural", "cosmic",
"ethereal", "magical", "connected", "dynamic",
"intimate", "cultural", "significant", "virtual",
"synthetic", "philisophical", "intellectual", "personified",
"hacktivist",
'synesthetic','technocultural','phenomenological','paridoxical',
'ontological','transcendental','technological','progressive',
'impermanent','dominant','ideal','sensitive',
'present','modern day','evocative','ephemeral',
'embodied','metaphysical','imaginative','fluid',
'artificial','presented','amplified','exemplified',
'exclamative','occularcentric','societal','cultural',
'divine','sonorous','elitist','conceptual',
'environmental','digital','spatial','electric',
'energetic','abstract','implied','associative',
'inquisitive','','','',]
verbs = [
[ "senses", "connects", "catches", "immerses",
"envelops", "points", "clicks", "transmits",
"transcends", "points towards", "manuevers", "paves",
"moves", "processes", "restores", "aborts",
"deletes", "detects", "disembodies", "filters",
"straddles", "derives", "trolls", "",
"hacks", "personifies", "operates", "destroys",
'reapproaches', 'massacres', 'redefines', 'defines',
'questions','ponders','approaches','justifies',
'seeks to find','discovers','finds','denotes',
'searches for','evaluates','rediscovers','uncovers',
'develops','derives from','is','was',
'will be','hopes to find','hopes to maintain','maintains',
'objectifies','glorifies','complicates','reimagine',
'imagines','will one day uncover','hopes to substantiate','portrays'],
#active verbs
["sensing", "connecting", "catching", "immersing",
"enveloping", "pointing",'pointing at', 'pointing towards', "clicking", "transmitting",
"transcending", "manuevering through", 'manuevering past', "paving",
"moving", "processing", "restoring", "aborting",
"deleting", "detecting", "disembodying", "filtering",
"straddling", "deriving", "trolling", "reassessing",
"hacking", "personifying", "operating", "destroying",
'reapproaching', 'the massacre of', 'redefining', 'defining',
'questioning','pondering','approaching','justifying',
'seeking to find','discovering','finding','denoting',
'searching for','evaluating','rediscovering','uncovering',
'developing','deriving','being',
'hoping to find','hoping to maintain','maintaining',
'objectifying','glorifying','complicating','reimagining',
'imagining','the uncovering of','the hope of substantiating','portraying'],
##capitalized
["Sensing", "Connecting", "Catching", "Immersing",
"Enveloping",'Pointing at', 'Pointing towards', "clicking", "transmitting",
"Transcending", "Manuevering through", 'manuevering past', "paving",
"Moving", "Processing", "restoring", "aborting",
"Deleting", "Detecting", "Disembodying", "Filtering",
"Straddling", "Deriving", "Trolling", "Reassessing",
"Hacking", "Personifying", "Operating", "Destroying",
'Reapproaching', 'The massacre of', 'Redefining', 'Defining',
'Questioning','Pondering','Approaching','justifying',
'Seeking to find','Discovering','Finding','Denoting',
'Searching for','Evaluating','Rediscovering','Uncovering',
'Developing','Deriving','Being',
'Hoping to find','Hoping to maintain','Maintaining',
'Objectifying','Glorifying','Complicating','Reimagining',
'Imagining','The uncovering of','The hope of substantiating','Portraying']
]
prepositions = ["aboard", "about", "above", "across",
"below", "beneath", "beside", "from",
"inside", "into", "like", "near",
"over", "past", "within", "among",
"amongst", "interior", "on", "til",
"toward", "under", "underneath", "upon",
"after", "before", "behind", "except",
'through','throughout','contained in','held within',
'defined by','in association with','in its relation to','by questioning',
'in the questioning of','in its explorations','while exploring',
'in its exploration of']
adverbs = [ "quickly", "bravely", "promptly", "silently",
"slowly", "stylishly", "abnormally", "non-conventionally",
"boldly", "astonishingly", "currently", "mechanically",
"materially", "literally", "magically", "negatively",
"positively", "vivaciously", "vigilantly", "unemotionally",
"scientifically", "structurally", "spectacularly", "visually",
"yearningly", "truthfully", "figuratively", "metaphorically",
"usefully", "uselessly", "systematically", "poetically",
"ominously", "overconfidently", "negatively", "positively",
'capriciously','inpermanently','permanently','sonically',
'socially','culturally','transcendentally','phenomenally',
'intelligently','progressively','synesthetically','abstractly',
'occularcentrically','temporarily','materially','conceptually',
'technologically','simply','easily','swiftly',
'exponentially','deeply','thoroughly','briefly',
'completely','entirely','uniformly','meticulously',
'broadly','specifically','efficiently','productively']
determiners = ["hella", "my", "certain", "any and all",
"enough", "next", "neither", "other",
"thine", "many", "each and every", "fewer",
"fewest", "most", "some kind of", "some sort of",
"last", "lasting", "every",
"every", "this and that", "that and this", "this of a",
"one that is", "yonder", "several", "that",
'this','each','all that is','everything that is',
'everything that contains','worldly','an','all',
'the entirety of','whichever','whatever','our',
'any','the most pronounced','obvious cases of','cases of',
'situations involving','involvements in','pertaining to',
'savory','our',"the world's",'American', 'does not',
'aims to']
def newLetterhead(pronouns, nouns, adjectives, verbs, adverbs, prepositions, determiners):
singular, plural, active = 0, 1, 1
# v - adj - n(singular) - prep - ve - n(plural)
line1 = "\n %s %s the %s %s \n %s %s %s..." % ( pronouns[random.randint(0, len(pronouns) -1 )],
verbs[0][random.randint(0, len(verbs[0])-1)],
adjectives[random.randint(0, len(adjectives)-1)],
nouns[singular][random.randint(0, len(nouns[singular])-1)],
prepositions[random.randint(0, len(prepositions)-1)],
verbs[active][random.randint(0, len(verbs[active])-1)],
nouns[plural][random.randint(0,len(nouns[plural]) -1)]
)
# v - adj - n(plural) - v - n(plural) - prep - det - n(plural)
line2 = "%s %s %s, \n it %s %s %s %s %s." % ( verbs[capitalized][random.randint(0, len(verbs[capitalized])-1)],
adjectives[random.randint(0, len(adjectives)-1)],
nouns[plural][random.randint(0, len(nouns[plural])-1)],
verbs[0][random.randint(0, len(verbs[0])-1)],
nouns[plural][random.randint(0, len(nouns[plural])-1)],
prepositions[random.randint(0, len(prepositions)-1)],
#nouns[singular][random.randint(0,len(nouns[singular]) -1)],
determiners[random.randint(0, len(determiners)-1)],
nouns[plural][random.randint(0, len(nouns[plural])-1)]
)
# pn - v - adj - n(plural)
line3 = " %s %s %s %s" % ( pronouns[random.randint(0, len(pronouns) -1 )],
verbs[0][random.randint(0, len(verbs[0])-1)],
adjectives[random.randint(0, len(adjectives)-1)],
nouns[plural][random.randint(0, len(nouns[plural])-1)],
)
letterhead = "%s \n %s \n %s." % (line1, line2, line3)
return letterhead
newLetterhead(pronouns, nouns, adjectives, verbs, adverbs, prepositions, determiners)









 Elements
Elements