Marynel Vázquez – Final Project Ideas
Interactive 3D Drawing Generator
The motivation for this project is the same I had for Project 4 ((r)evolve).

Graffity Analysis v3.0

Personal Space Competition
Have you thought of how your personal space changes as your day goes along? This idea involves a small installation driven by transit data (maybe another type of data if new ideas come to mind).
The installation is composed by a constrained space (a box for example) and two balloons that compete for this space while inflating. Here’s an example of an inflating balloon controlled with an Arduino:

Is there any source of data about how personal space changes between cultures?
We Be Monsters: An Update
So because everyone is already familiar with the ins and outs of our project, we’re basically just telling people that a.) we have extensive plans for future updates, and b.) we need help from all of you with Processing chops to give this a read-through and throw in your two cents as to how to improve the mechanics.
For some reason the Prezi embed is failing on me, so here’s the permalink:
Comments Off on We Be Monsters: An Update
Eric Brockmeyer – Looking Outwards 3
I dig the star wars reference, but the use of the kinect for a holographic image is something new. It seems like every other day a new usage for this device becomes available. The video isn’t a great representation of the usage of this technology
kRC // kinect controlled rc helicopter from Shawn Sims on Vimeo.
Comments Off on Eric Brockmeyer – Looking Outwards 3





Mark Shuster – Project 4 – Looking Outwards
Incoming…
Comments Off on Mark Shuster – Project 4 – Looking Outwards
Final project ideas
1. Source of inspiration
My source of inspiration for this project is Hakim El Hattab’s HTML5 blob demo. I really liked the fluidness and interaction afforded by the demo, and I believe it would be a great experiment with this interaction further.
2. Artistic or design goal
I want to create a space where the user can interact with fluid blobs like these in an intuitive and enjoyable manner. Perhaps the user can interact with the blobs via a webcam or mouse. Another thought is to create on online synchronous platform where users can interact with one another’s blobs.
3. Technical hurdles
If the goal is to create an online synchronous platform, there would be hurdles in how synchronous play would be implemented.
4. Question to ask group
Any ideas on how to implement an online synchronous platform?



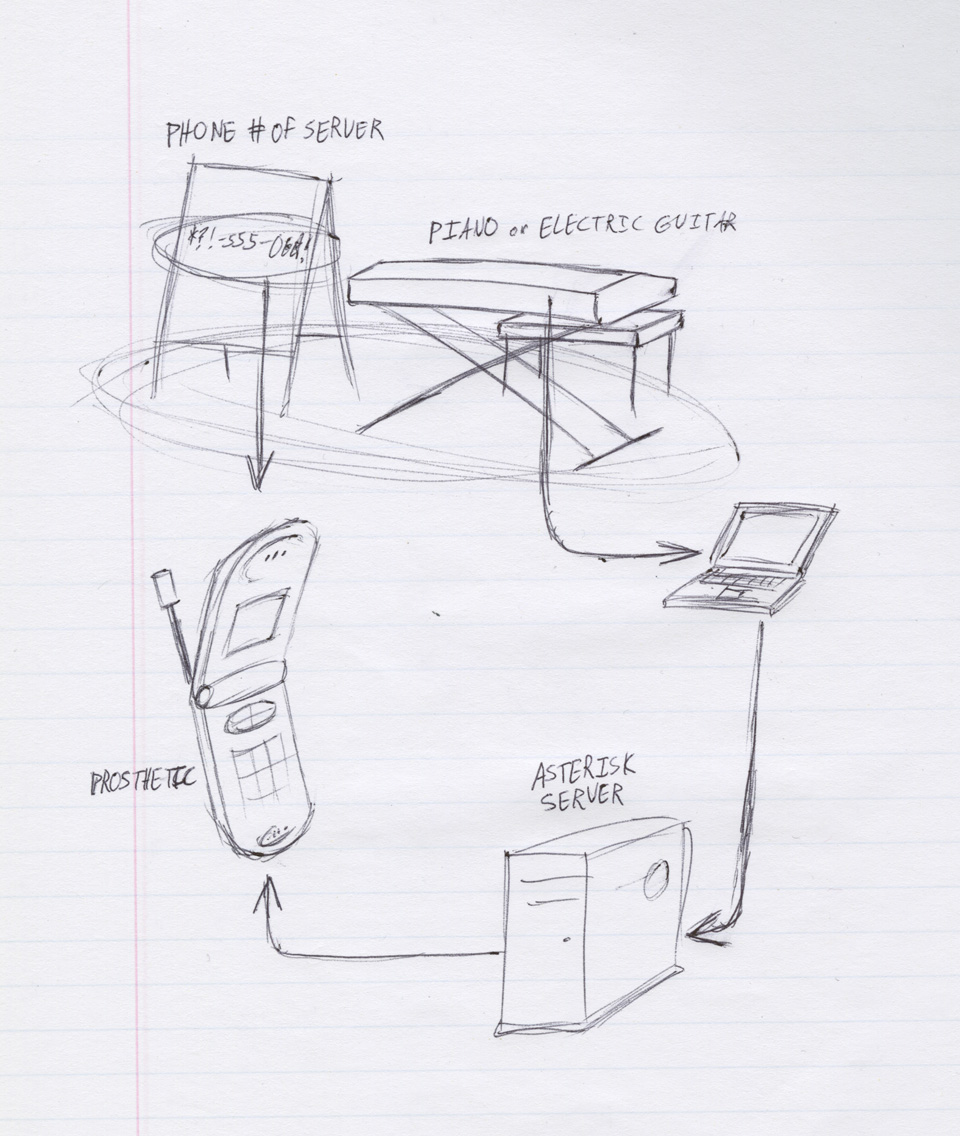
Final Proposal
Inspired by the stunning Japanese drum show KODO (http://goo.gl/9Y9OK) in Pittsburgh a couple of weeks ago, Cheng & I had the idea of re-perform those variational and euphoric drum pattern by using a set of “drum robots”. In the show, there were less then 10 people and each handled one or two drums; everyone’s drum patterns are not very complicate but as a whole, these simple drum patterns mixed together and sounds subtle and amazing.
In this project, we are trying to build a couple of drumbots. Each bot have a certain function like LOOP, 2xSPEED, 2/SPEED, ONEtoTWO, etc, and each bot will pass get the drum pattern from it’s parent drum, generate a new drum pattern based on it’s own function, and pass it to the next drum. (We get inspired by Andy Huntington’s TapTap project. It’s awesome.) Each drum can also has different types of drumstick (wood, metal,etc) to make different sound, and some of the bots may have even 2 or 3 drumsticks to pass it’s pattern to more drum bots.
To test our thought, I spend a few days and write a dirty drum simulator with Processing. It’s pretty bad looking and simple functional, but it do shows the potential of the project.

We have sketched several potential look-and-feel for the drum bots and haven’t make a final decision, but we feel cube could be really compelling. Not only because it is simple and stable, but also because it has a potential to create more interesting combinations. It has 6 faces, which means it may get the beat pattern not only by it’s top face, but also it’s 4 side faces. All faces all the same, which means we can put robots down on one side or pile them up, like the right picture below.


The mechanical thing is annoying. We are trying to use Arduino as micro controller, solenoid as actuator and piazo sensor as input, and no usb, just battery. But after doing some experiment, we find the solenoid eat lots of power but still the beat is not good enough. This’s the another problem we need to solve beside the look-and-feel.
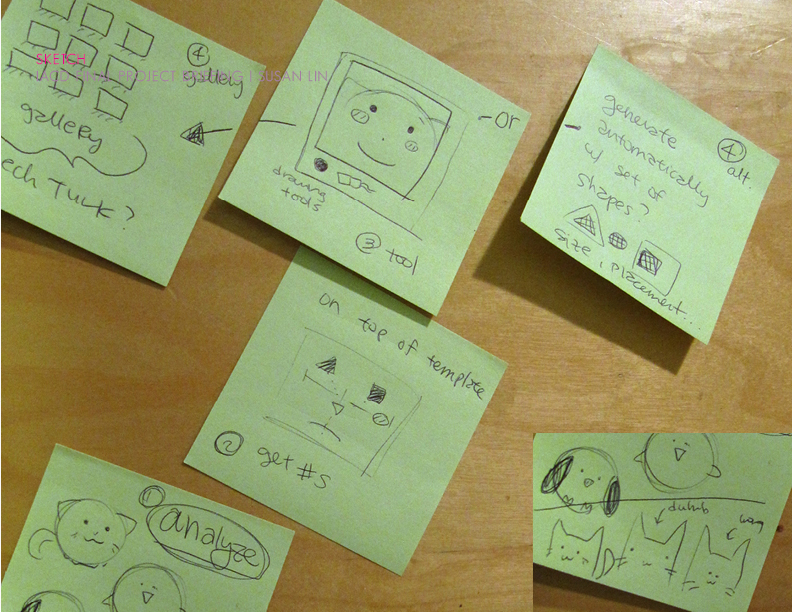
Susan Lin – Final Project: The Cute Manifesto, Brief Presentation
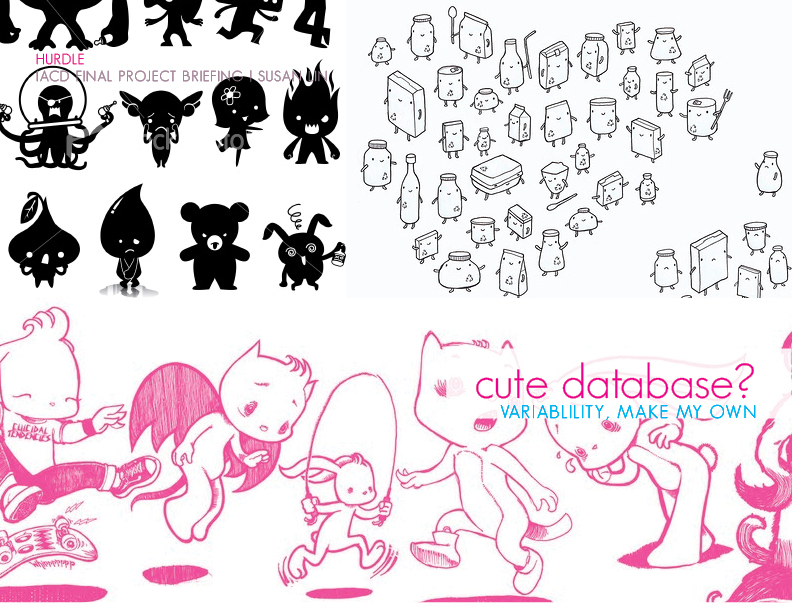
Comments Off on Susan Lin – Final Project: The Cute Manifesto, Brief Presentation

Eric Brockmeyer – CNC Gastronomy Update
INSPIRATION


DESIGN IDEA

TECHNICAL HURDLES

SKETCH

IDEAS






shawn sims-lookingOutwards-FINAL
I plan on continuing to work with the ABB4400 robot in dFab. My final goal is live, interactive control of the machine. This may take the form of interactive fabrication, dancing with the robot, or some type of camera rig.
Inspiration

There have been a few projects and areas of research that have given me inspiration. The use of robotic surgery tools is an extremely adept example of interactive/ live control of robots while maintaining the precision and repeatability they are designed for. The ultimate goal of my project is to leverage these same properties of the robot through a gestural interface.
There is a very interesting design space here, which is the ability for these robots to become mobile and perform these tasks in different environments. My vision on the future of architecture is these robots running around building and 3d printing spaces for us. something like this…


Design Goal
The project will explore the relationship between the users movement and gesture and the fabrication output of the robot. This is to say that the interpretation of the input will be used to work on a material that offers a unique and efficient relationship to the user. IE the user bends a flex sensor and the robot bends steel, or the user makes a ‘surface’ by gesturing hands through air and robot mills an interpretation of that surface. A few other ideas are an additive process like gluing things together based on user input like this example…
Technical Hurdles
TCP/IP opensocket communication is proving to be a bit tricky with the ABB Robot Studio software. I beleive that we can solve this problem but there is some worries about making sure we dont make the super powerful robot bang into the wall or something because that would be costly and bad.

Question
What are some interesting interfaces or interactions you can imagine with the robot? input // output?
There are a few constraints like speed, room size, safety, etc…
Thanks