This is a modal window.
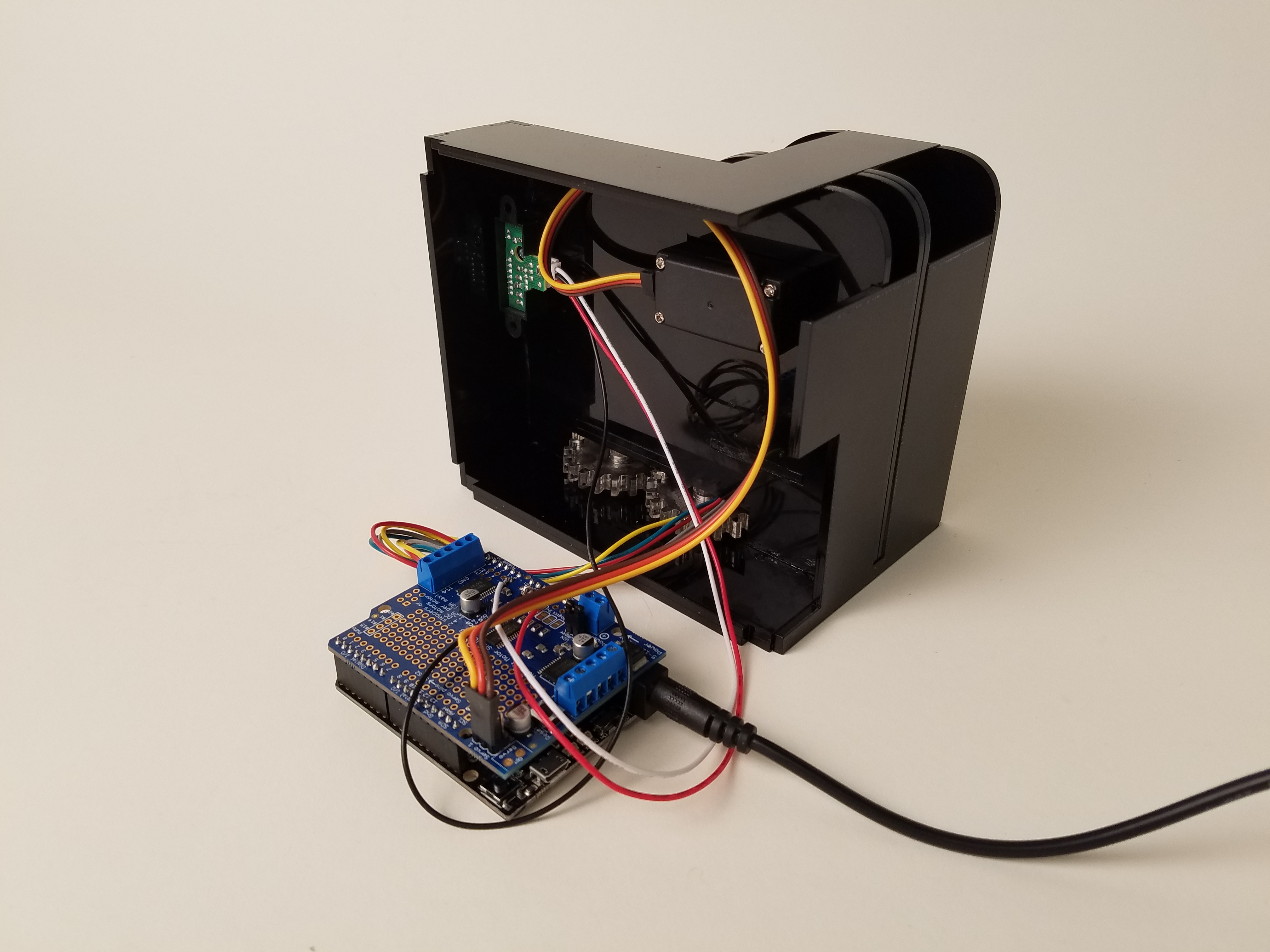
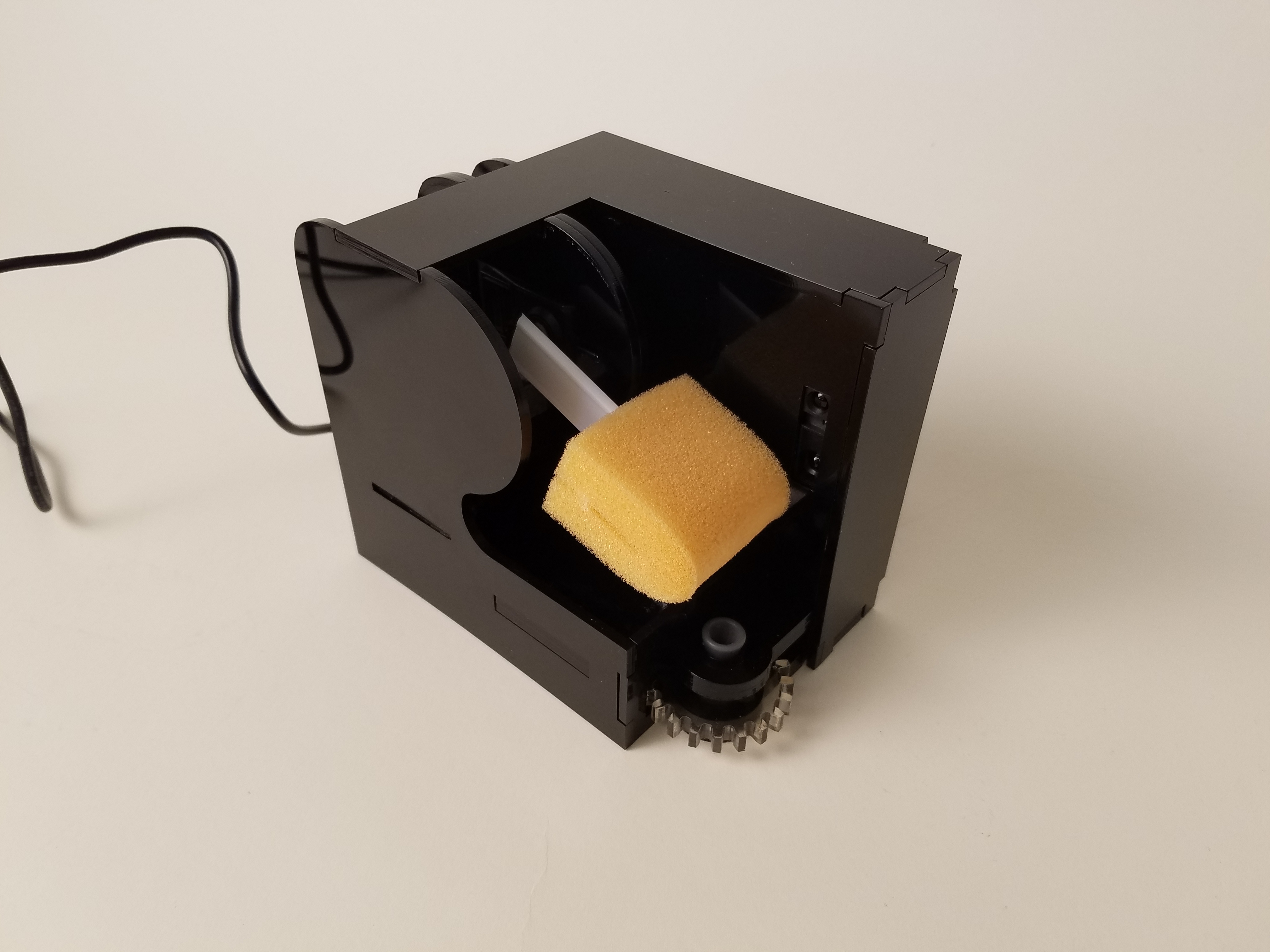
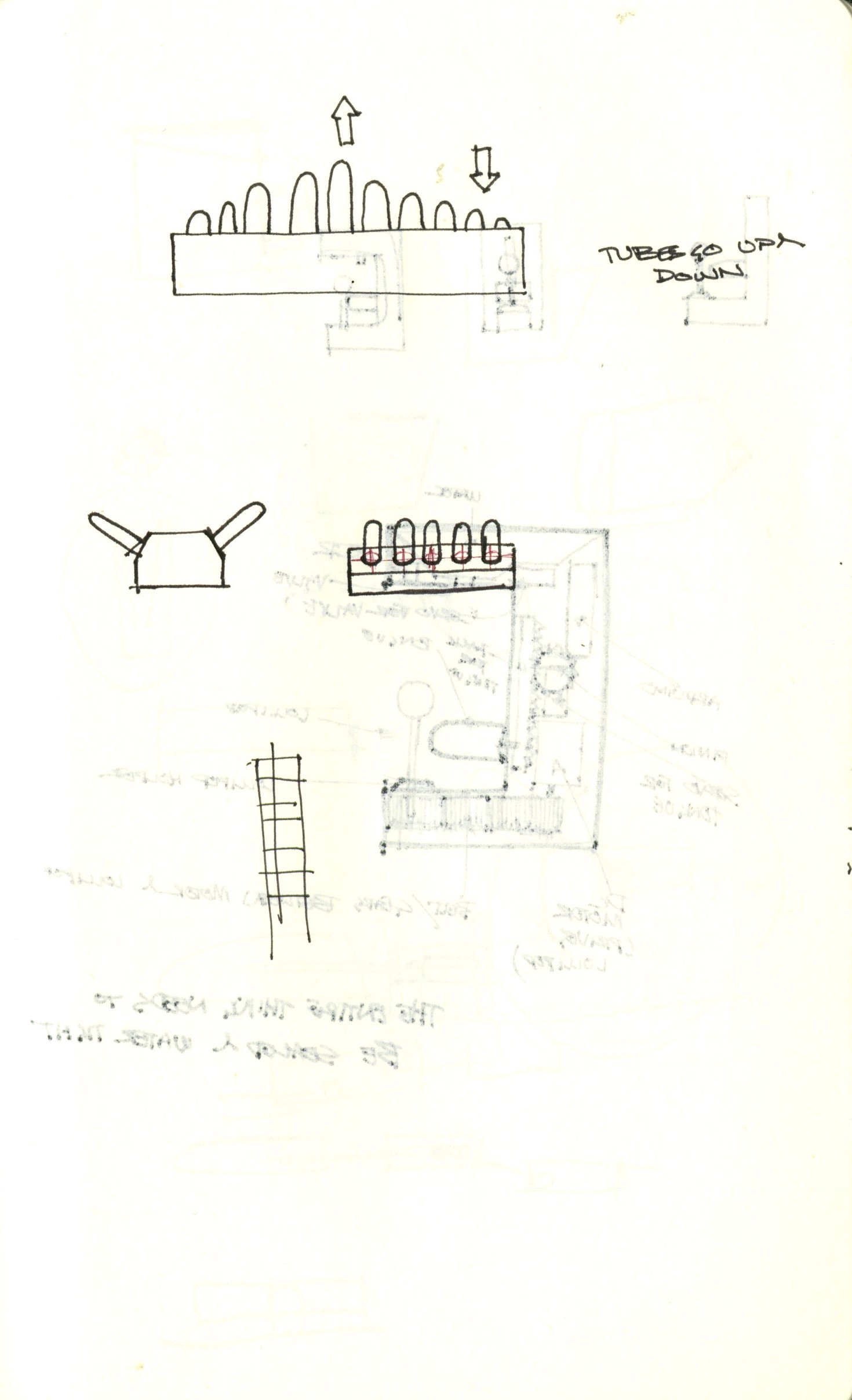
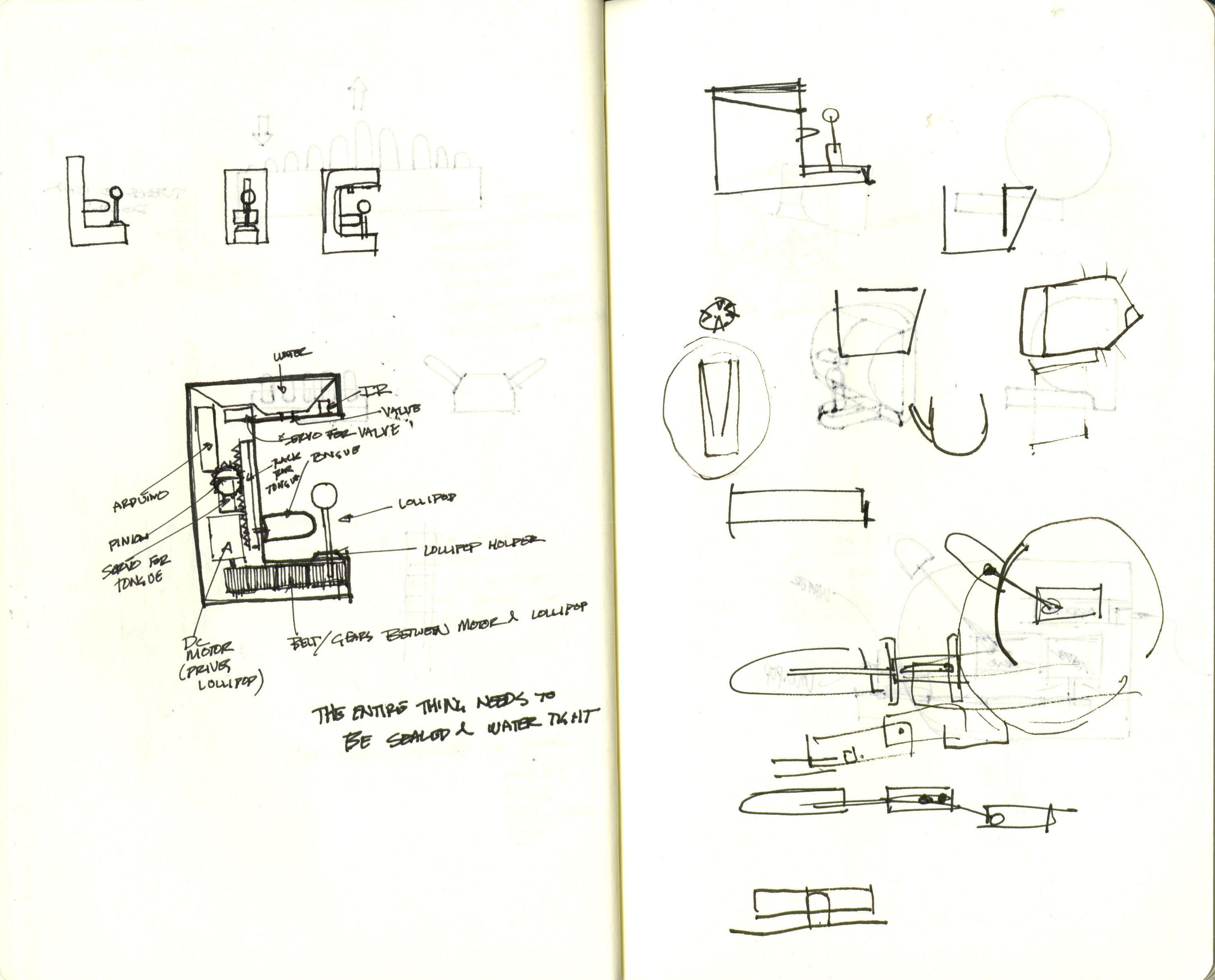
We created a lollipop-licking robot for our automaton. The robot uses an IR distance sensor to pick up when someone has placed a lollipop into the lollipop holder, which initiates the robot's licking. A tongue made out of a sponge moves up and down (powered by a servo) while the lollipop rotates (powered by a stepper). The tongue dips into a tray at the bottom of its movement that is supposed to contain water to keep the tongue wet for its licking.
We came up with a couple of automaton ideas, but really couldn't settle on anything to begin with, so we went to the Center for Creative Reuse to get some inspiration. The entire project was inspired by sponges we found at there. The scale of the robot, the type of lollipop the robot was licking, and the movement were all based around using the sponge as a tongue. To keep the tongue wet, we had a couple of ideas. We first thought we might be able to wet the tongue once before it starts licking a lollipop, but we realized that this did not provide enough water to get through an entire lollipop. We then planned to have water dripping down onto the sponge from the top (and later from the side), but both ideas necessitated the use of some sort of valve, and we figured this was too complicated for the scope of the assignment. We then settled on the idea of using a stationary tray of water that the tongue could dip into when needed.
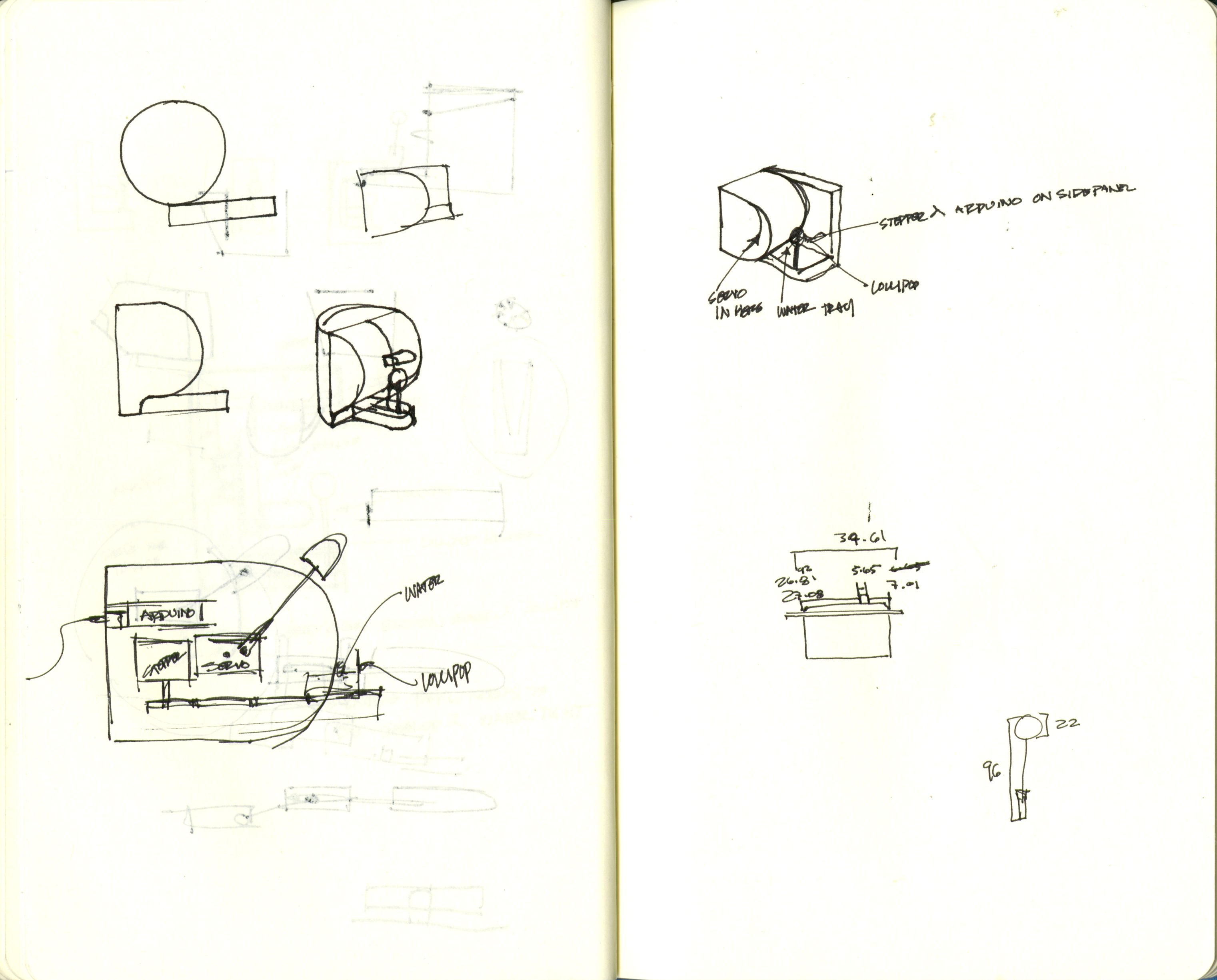
After settling on a design for the robot, we modeled the structure and shell in SolidWorks, accounting for the electronics that would be placed inside.
Despite our measurements, we failed to account for a couple of things. Most notably, we didn't account for the space needed for the servo's plug (we just made space for the Arduino on its own). As a result, our robot currently doesn't have its back. Also, we did not have time to seal the water tray, so our robot currently cannot hold water. The tongue knocks the the lollipop out of its slot sometimes (an issue that could be addressed by moving the tongue a couple of millimeters back and making the lollipop slot a little bit tighter). As a final point of improvement, the tongue's movement could be adjusted to make it a more natural movement.