Assignment 10 [prototype] – Kyna
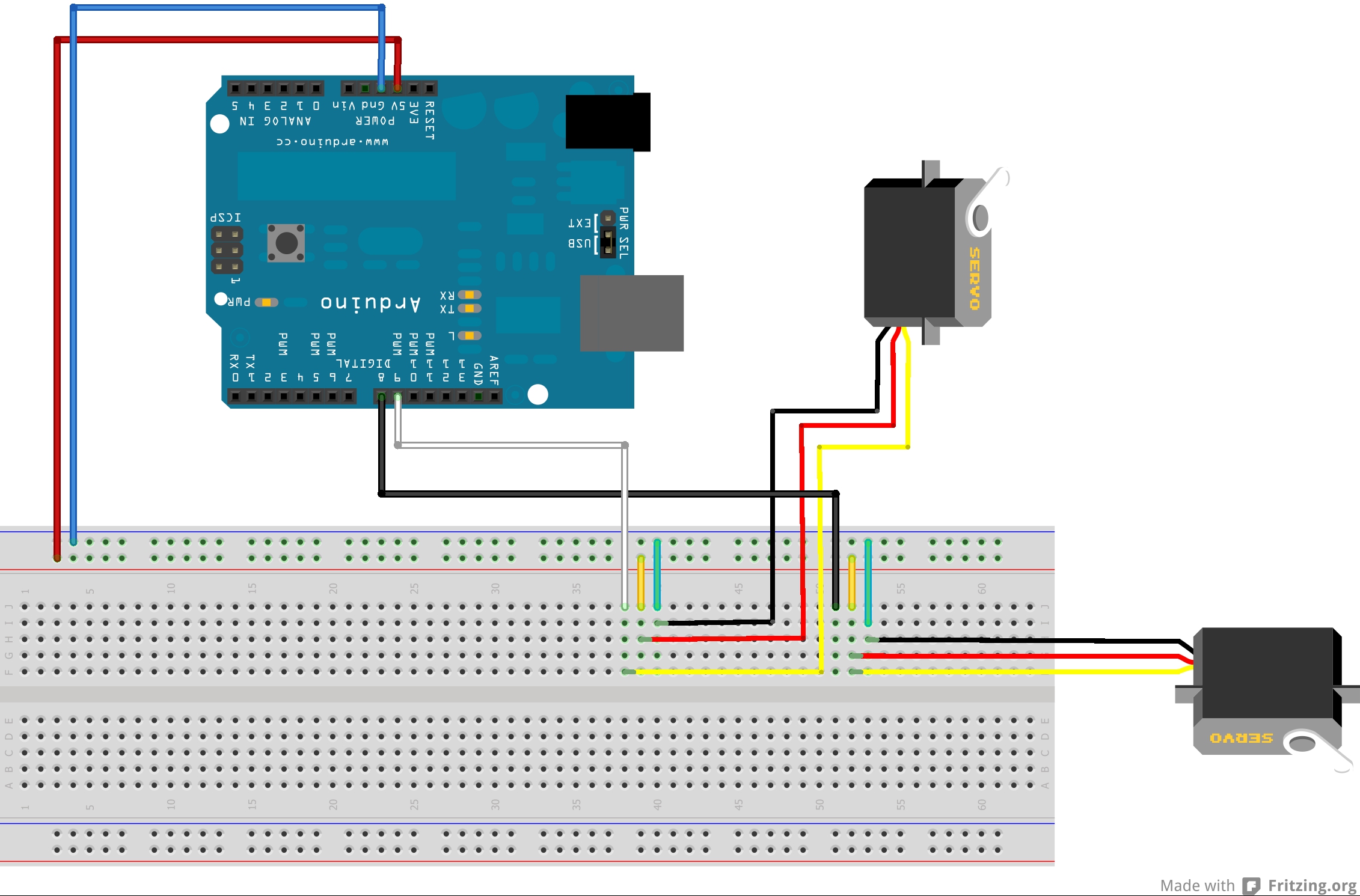
Currently I only have a working prototype. The prototype uses two servo motors for motion (literally the most naive implementation, haha), but the final product will probably use the gear motor/cam setup so it’s less jerky.
[youtube http://www.youtube.com/watch?v=l4rldiLAAu8&w=420&h=315]