#include
// Create a servo "object", called servo1. Each servo object
// controls one servo (you can have a maximum of 12):
Servo servo1;
const int flexpin = 0;
const int motorPin = 5;
void setup()
{
Serial.begin(9600);
servo1.attach(9);
pinMode(motorPin, OUTPUT);
}
void loop()
{
int motospeed;
int flexposition; // Input value from the analog pin.
int servoposition; // Output value to the servo.
// Read the position of the flex sensor (0 to 1023):
flexposition = analogRead(flexpin);
servoposition = map(flexposition, 760, 938, 0, 180);
servoposition = constrain(servoposition, 0, 180);
motospeed = map(flexposition,760,930,0,255);
servo1.write(servoposition);
analogWrite(motorPin, motospeed);
//serial sensor info
Serial.print("sensor: ");
Serial.print(flexposition);
Serial.print(" servo: ");
Serial.println(servoposition);
delay(20); // wait 20ms between servo updates
}
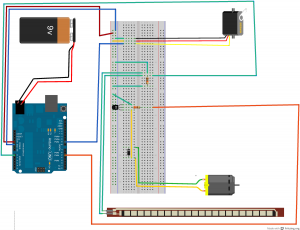
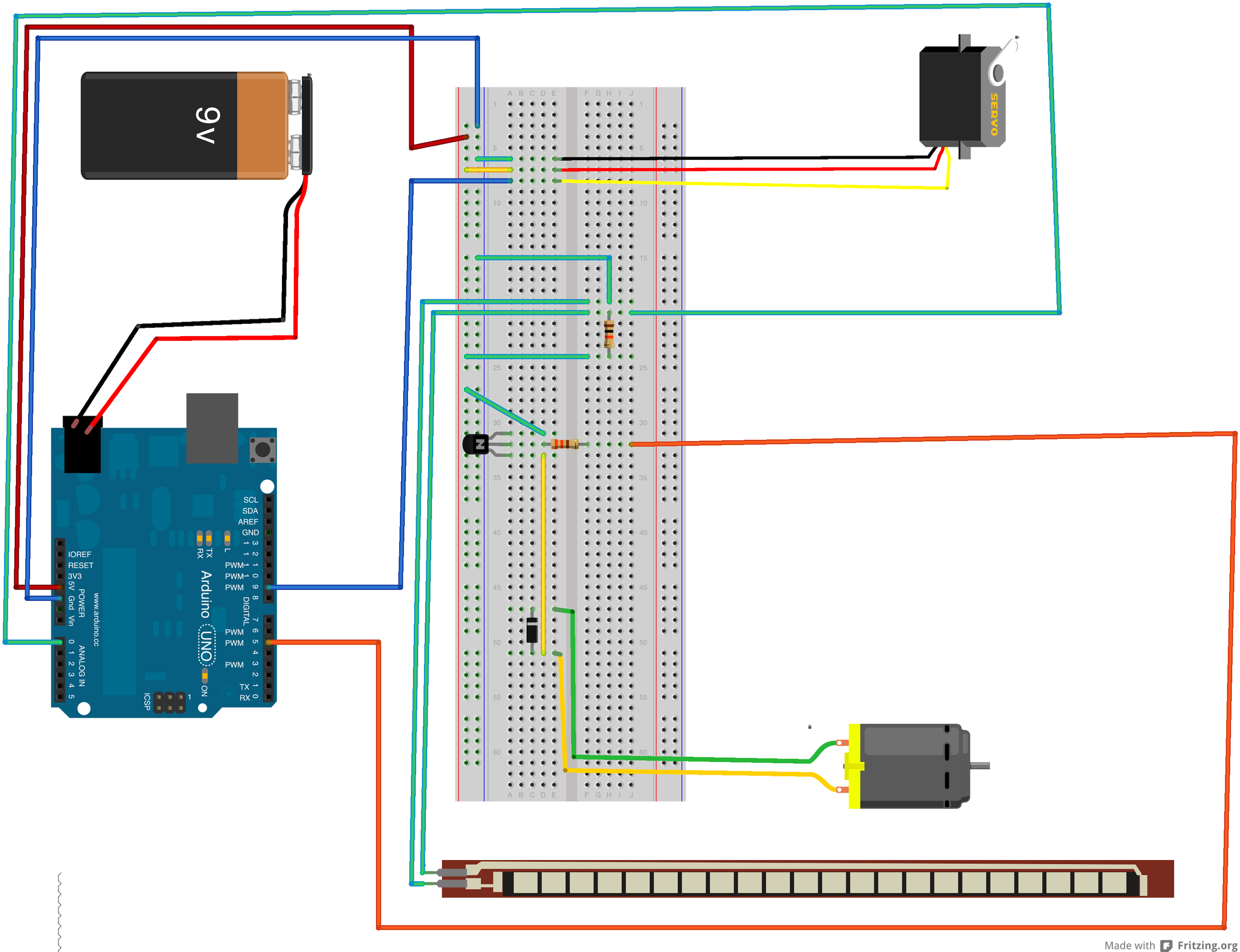
The guts of my Mummy
This was an exciting project. I used one flex sensor, one motor and a servo. The action is activated by "hurting the mummy" - this means bending him in places he does not want to bend. This upsets the Mummy and as you hurt him, he begins to writhe in pain - flailing his arms as his head spins.
 The guts of my Mummy
The guts of my Mummy