Hallowuino
I decided to make a mutant Baby Pumpkin Monster in celebration of Hallowuino. If you leave ze monster alone, it is a peaceful jack-o-latern. But, if you push his button, he will seek revenge. His eyes will switch from a yellow glow to flashing red, and his arms will swing with the intent to attack you.

If I were to put this piece in gallery, there would be a spooky night background behind it, and a metal link chain would be wrapped around it making it look as if it is being restrained. There would also be a sign next to it that reads: “Beware of Monster: DO NOT PUSH HIS BUTTON”. For some reason it is a natural instinct for people to rebel and press the button in this case, thus making the piece interactive.
Here is the video of my monster:
[flickr video=8148308678 secret=4d30222477 w=400 h=225]
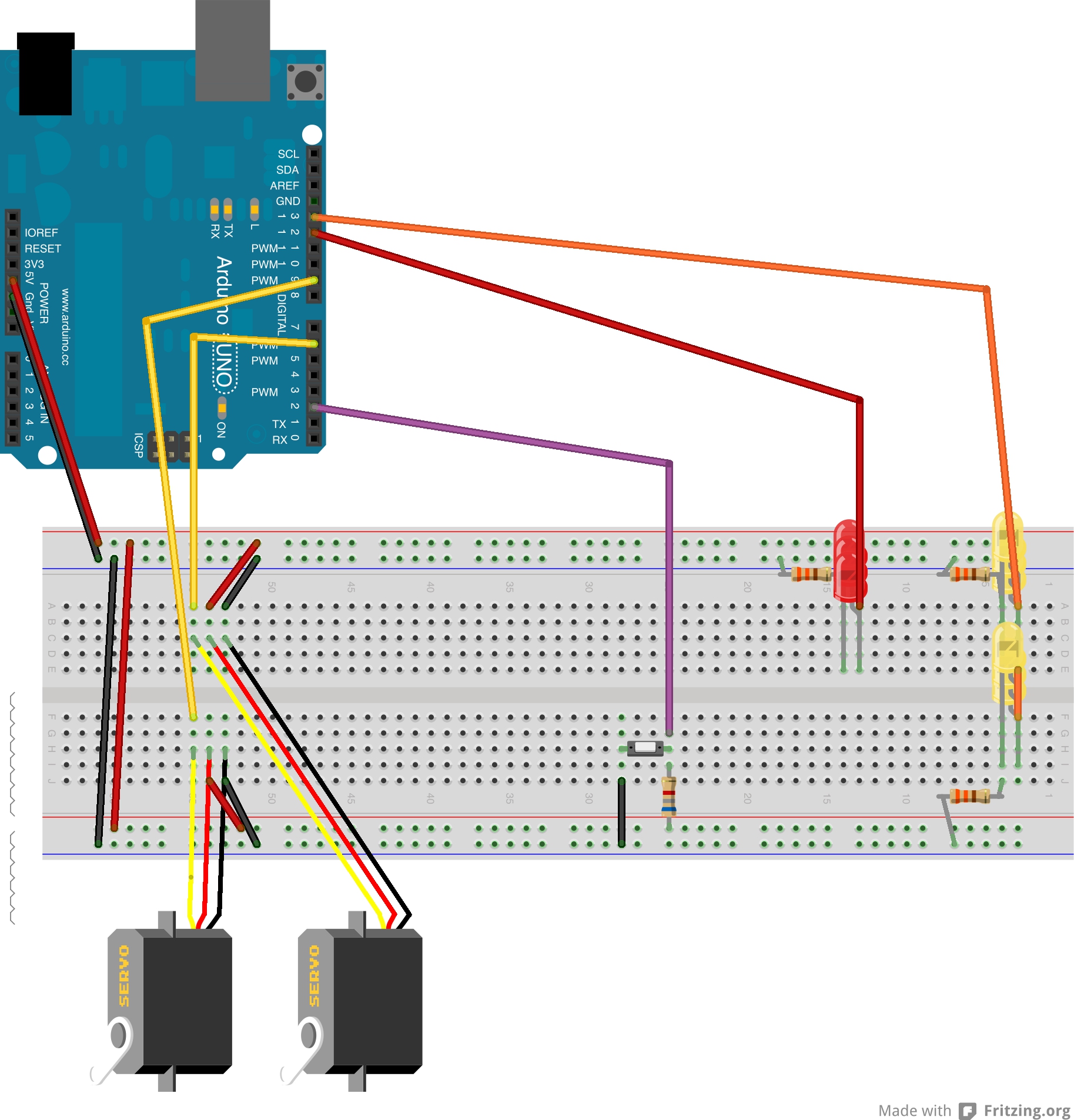
Here is the Arduino Fritzing diagram of my monster:
Here is the code for my monster:
#include // servo library
Servo servo1; // servo control object
Servo servo2; // servo control object
int redLED = 12;
int yelLED = 13;
const int buttonPin = 2;
//-----SCARY SETTINGS-----
int redEyeFlashTime = 75;
int motorCalls = 4;
void setup()
{
pinMode(redLED,OUTPUT);
pinMode(yelLED,OUTPUT);
pinMode(buttonPin, INPUT);
servo1.attach(9);
servo2.attach(6);
normalMode ();
}
void loop()
{
//-----Check Button State-----
int buttonState = digitalRead(buttonPin);
if (buttonState == LOW)
{
scaryMode();
}
else
{
normalMode();
}
}
void normalMode ()
{
digitalWrite(redLED, LOW);
digitalWrite(yelLED, HIGH);
}
void scaryMode ()
{
//-------SERVO CODE-------
for(int i = 0; i < motorCalls; i++)
{
//int position1 = constrain(random(0, 180), 0, 180);
int position1 = constrain(random(0, 180), 110, 180);
servo1.write(position1); // Move to next position
int position2 = constrain(random(0, 180), 110, 180);
servo2.write(position2); // Move to next position
//-------LED CODE----------
digitalWrite(yelLED, LOW);
digitalWrite(redLED, HIGH);
delay(redEyeFlashTime);
digitalWrite(redLED, LOW);
//-------SERVO CODE-------
position1 = constrain(random(0, 180), 0, 70);
servo1.write(position1); // Move to next position
position2 = constrain(random(0, 180), 0, 70);
servo2.write(position2); // Move to next position
delay(redEyeFlashTime);
}
}