Let the light grow is a generative system by @pveloso13 that enables the creation of a tree lamp for your room.
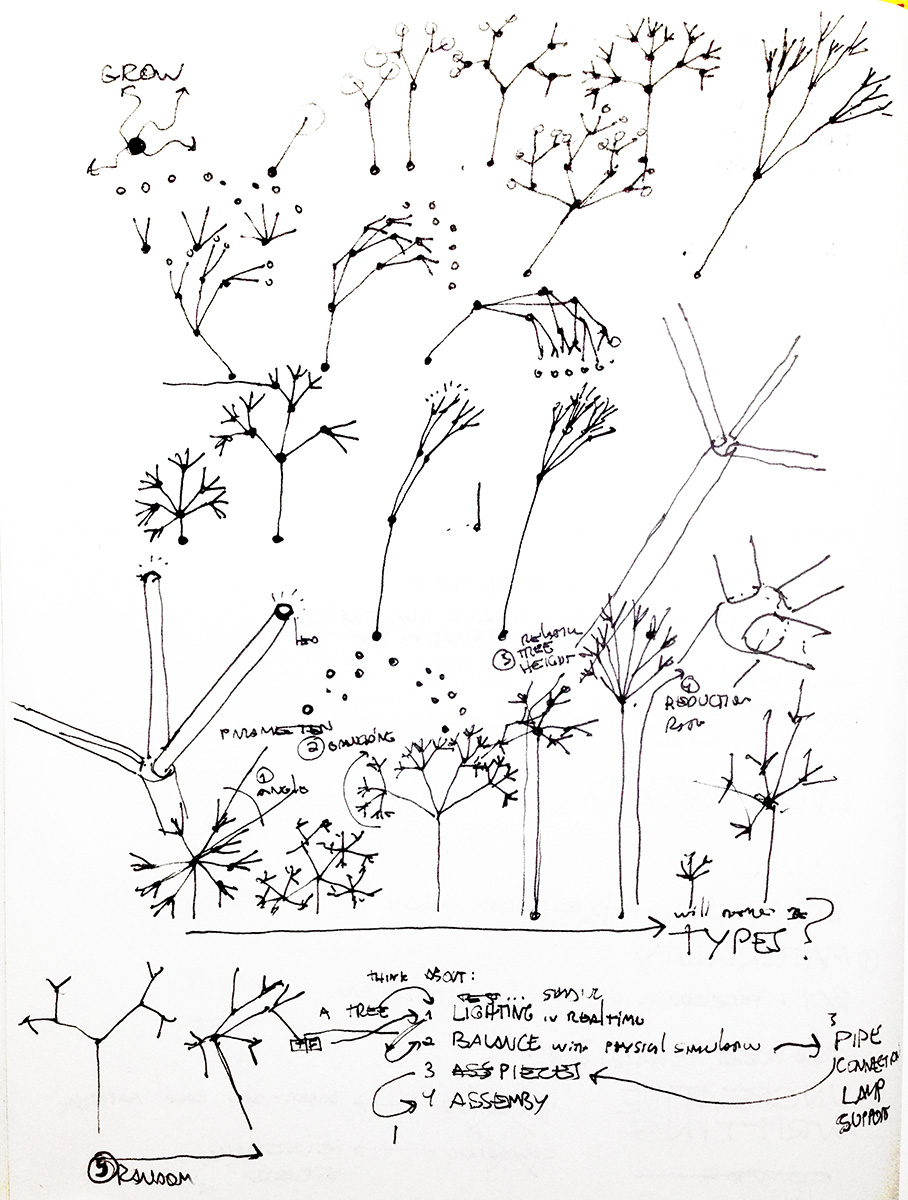
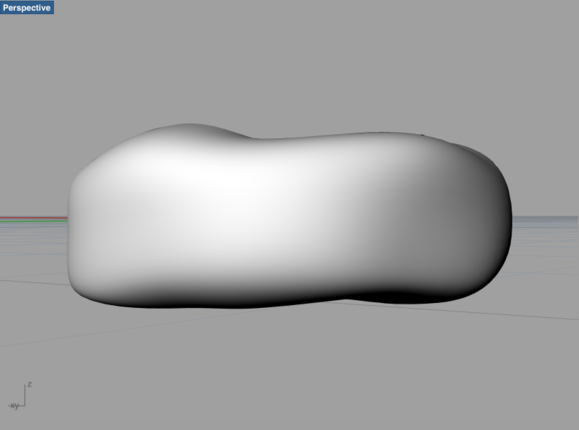
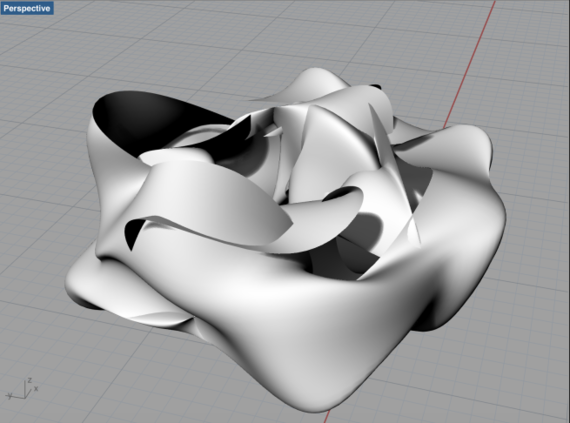
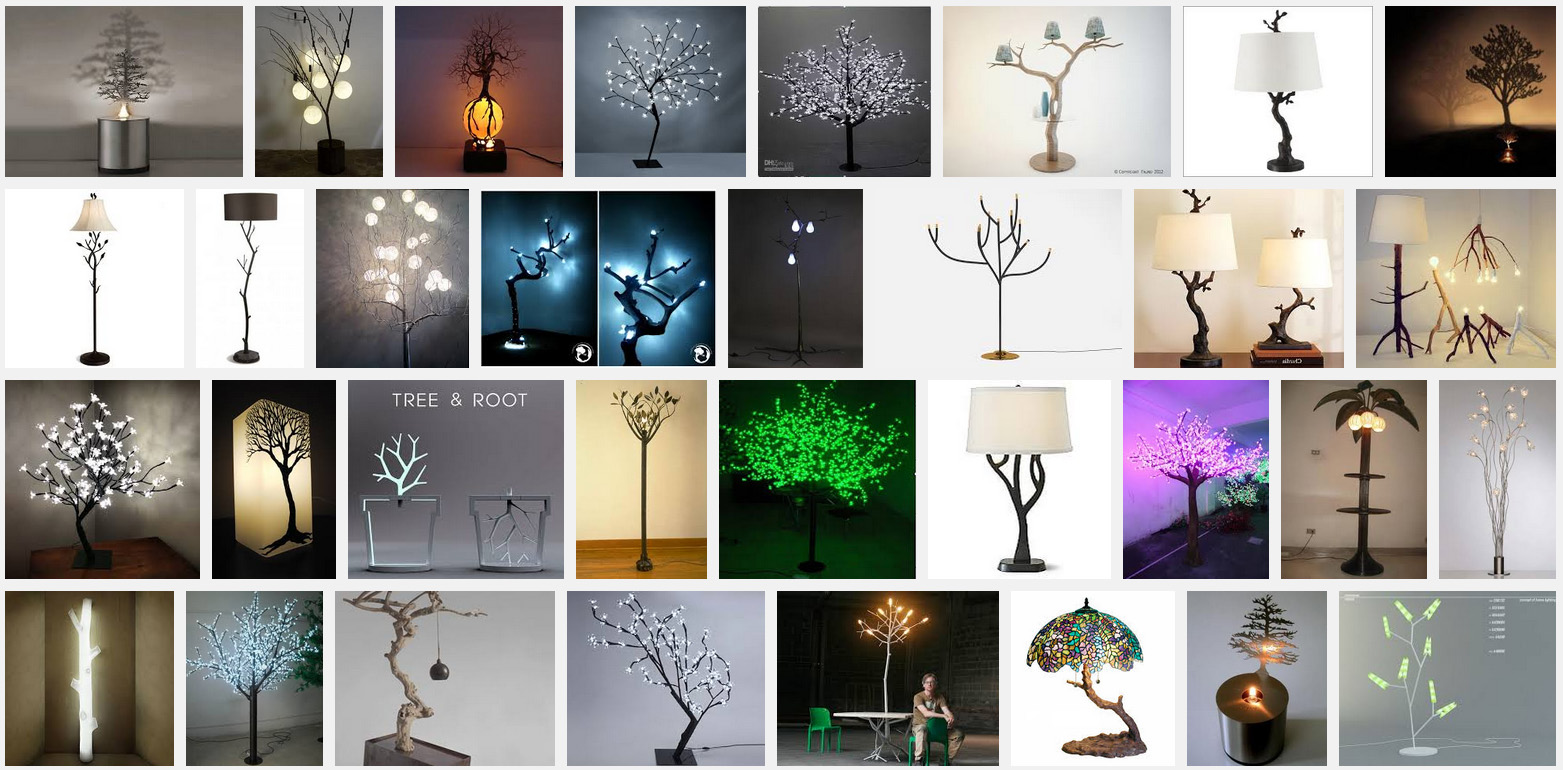
A tree is a very meaningful thing. It grows, it adapts to the environment and at the same time that it is part of a large family, it is unique. One one hand, it seems to be a very great idea to have a tree in your room as a lamp. On the other hand, Google search shows that you can find many lamps inspired by trees. But why choose if you can design a tree lamp that fits perfectly to your needs? Besides, what is the value of having a unique design, customized and assembled by yourself? This lamp is produced by based a tree fractal controlled by specific parameters such as angle of the branches, branch division, reduction between branches, size, generations and a random factor. After defining the basic type of the tree, the user can choose optional features, such as the type of illumination, the optimization of the branches (string and repulsion algorithms) or the simulation of the light. Them, let the program calculate the material and (dis)assemble the parts.
Some of the problems you had to solve in developing it;
-Hardware limited to deal with the combined transformations, what demanded a more linear customization of the tree.
What you think you did well:
-I believe that the tree is a very intriguing object and it fits perfectly for a parametric lamp.
What you could have done better:
-as Golan and Google said, a fractal tree is not the most original object… but with more time, I would like to break the topology of the fractal tree and develop more details for joints and installation.
The system was developed with Rhino + Grasshopper + GHPython + Kangaroo. Below (or in GitHub) is the GHPython base algorithm for the tree:
import rhinoscriptsyntax as rs
import Rhino.Geometry as rg
import random
import rhinoscriptsyntax as rs
from Grasshopper.Kernel.Data import GH_Path
from Grasshopper import DataTree
lights = []
base_tree.Clear()
tree = base_tree
def createBranch(base_branch, cur_len, max_ang, num, ang):
ang_cone = max_ang + random.randrange(-10, 11) / 10 * rand_factor * max_ang / 2
ang_plane = num * ang + random.randrange(-10, 11) / 10 * rand_factor * ang / 2
old_vector=rs.VectorCreate(base_branch.To, base_branch.From)
new_vector = rs.VectorUnitize(old_vector)
new_vector = rs.VectorScale(new_vector, cur_len)
MutationPlane = rs.PlaneFromNormal((0,0,0), new_vector)
new_vector = rs.VectorRotate(new_vector, ang_cone, MutationPlane.YAxis)
new_vector = rs.VectorRotate(new_vector, ang_plane, old_vector)
return rg.Line(base_branch.To, new_vector)
#return rs.AddLine(base_branch.To, base_branch.To + new_vector)
root_branch = rg.Line(rg.Point3d(0,0, -10), rg.Point3d(0, 0, 0))
base_branches=[]
cur_branches=[]
all_branches=[]
total_fac = 0
for i in xrange(gen):
total_fac += factor ** i
cur_len = max_len / total_fac
first_branch = createBranch(root_branch, cur_len, rand_factor * random.random() * 20, 0, 360 )
all_branches.append(rs.coerceline(first_branch))
base_branches.append(rs.coerceline(first_branch))
path = GH_Path(0)
tree.Add(first_branch, path)
for i in xrange(1,gen):
cur_len *= (factor + factor * random.randrange(-2, 2) / 10 * rand_factor)
path = GH_Path(i)
for j in xrange(0,len(base_branches)):
new_range = max(1, max_branch + random.randrange(-2, 2) * rand_factor)
for k in xrange (0, new_range):
ang = 360 / max_branch
new_branch = createBranch(base_branches[j], cur_len, max_ang, k, ang )
if i == gen - 1:
lights.append(new_branch.PointAt(1.0))
cur_branches.append(new_branch)
tree.Add(new_branch, path)
base_branches = cur_branches
for branch in cur_branches:
all_branches.append(branch)
cur_branches=[]