SeaLegs: A Squid-Based Modeler for Digital Fabrication – Madeline Gannon
SeaLegs, a responsive environment for “Mollusk-Aided Design”, harnesses the power of simulated virtual squids to generate baroque and expressive spatial forms. Specifically, the project uses “chronomorphology” — a 3D analog to chronophotography — to develop complex composite forms from the movements of synthetic creatures.
[vimeo 42085064 width=”620″ height=”350″]
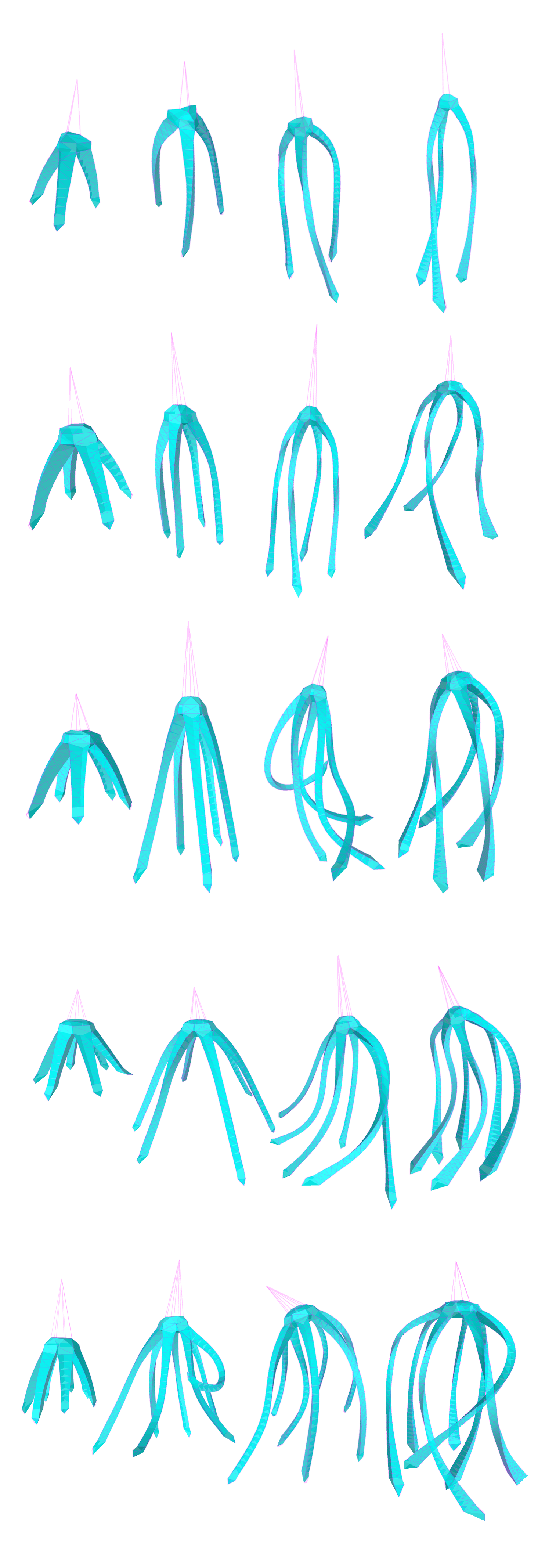
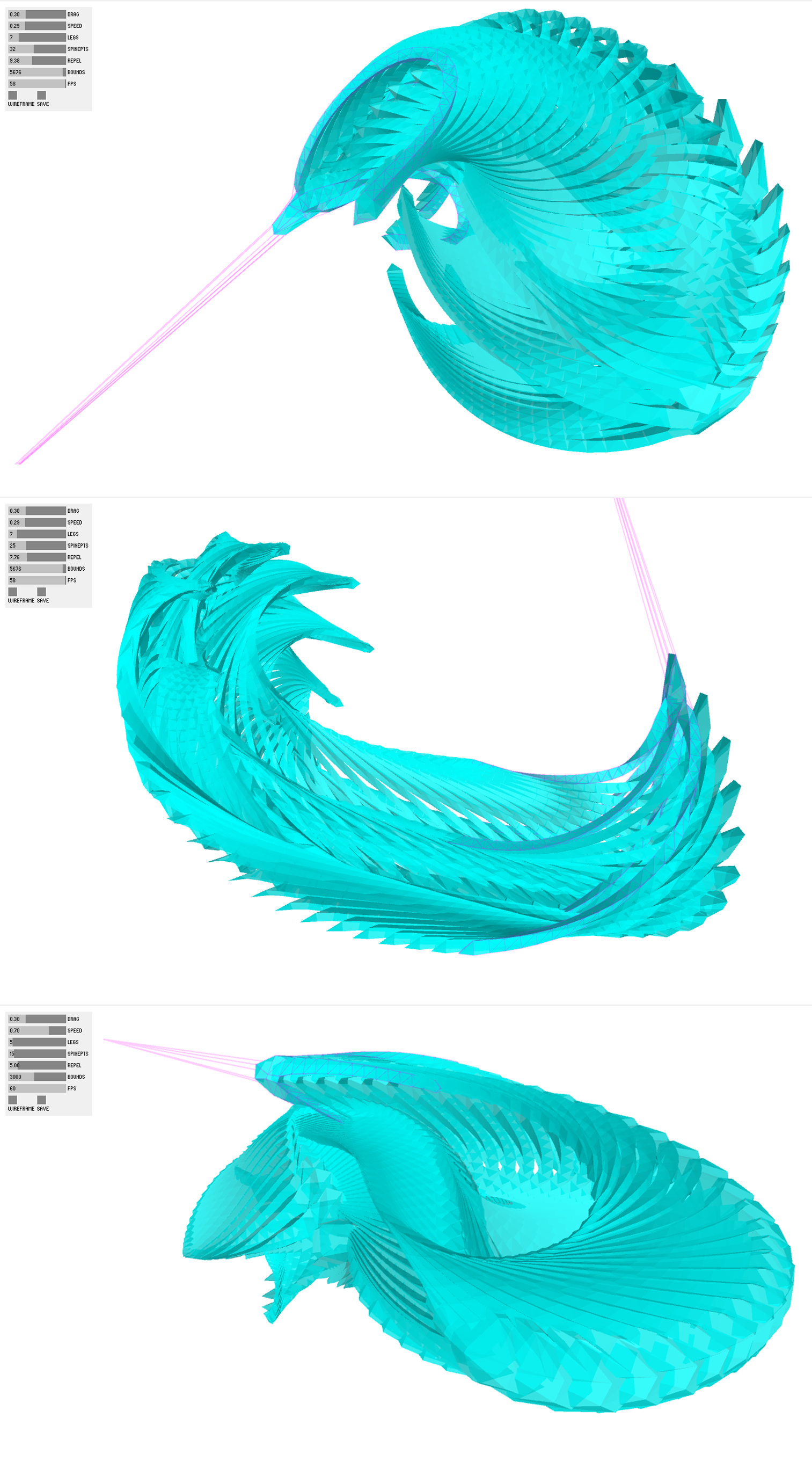
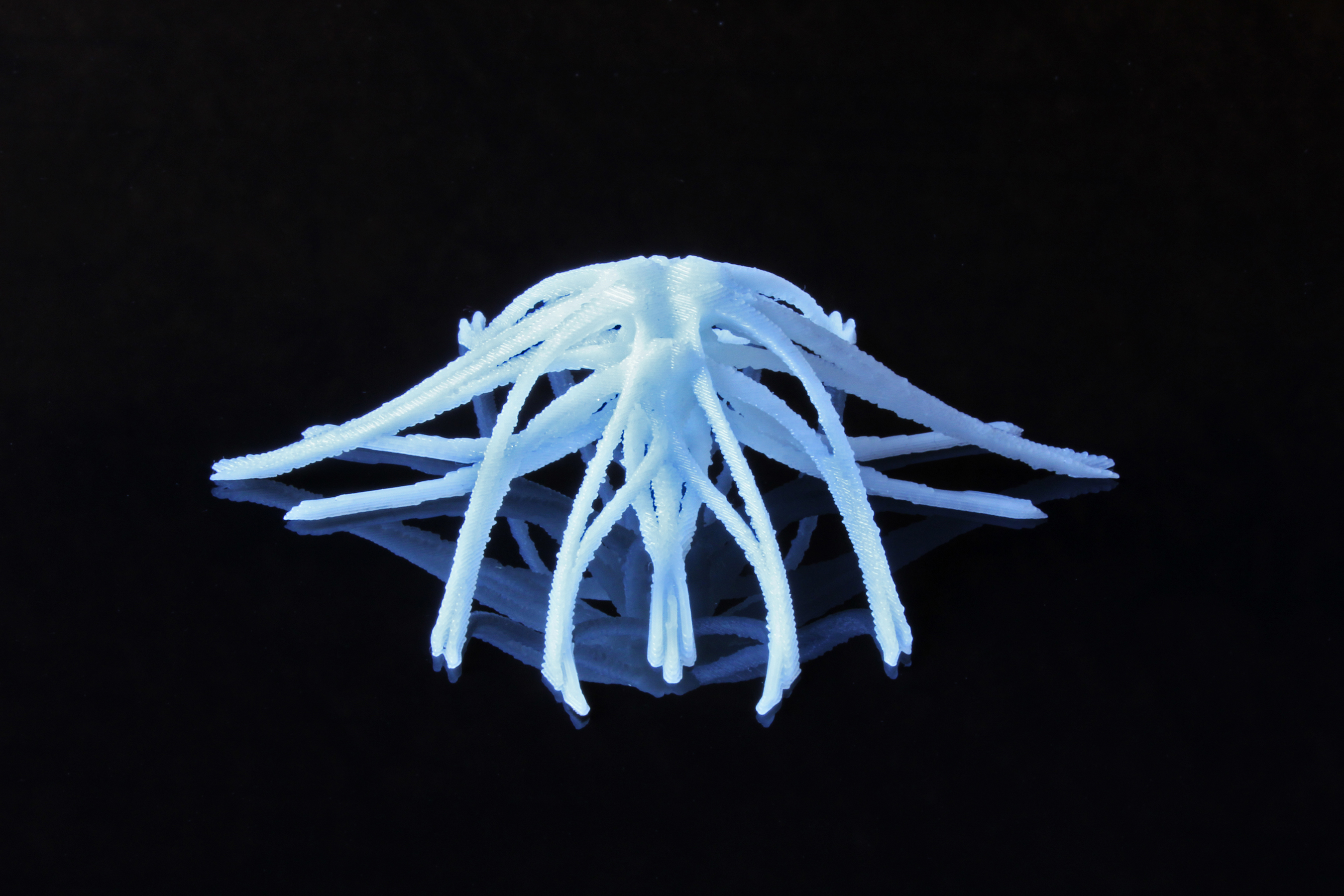
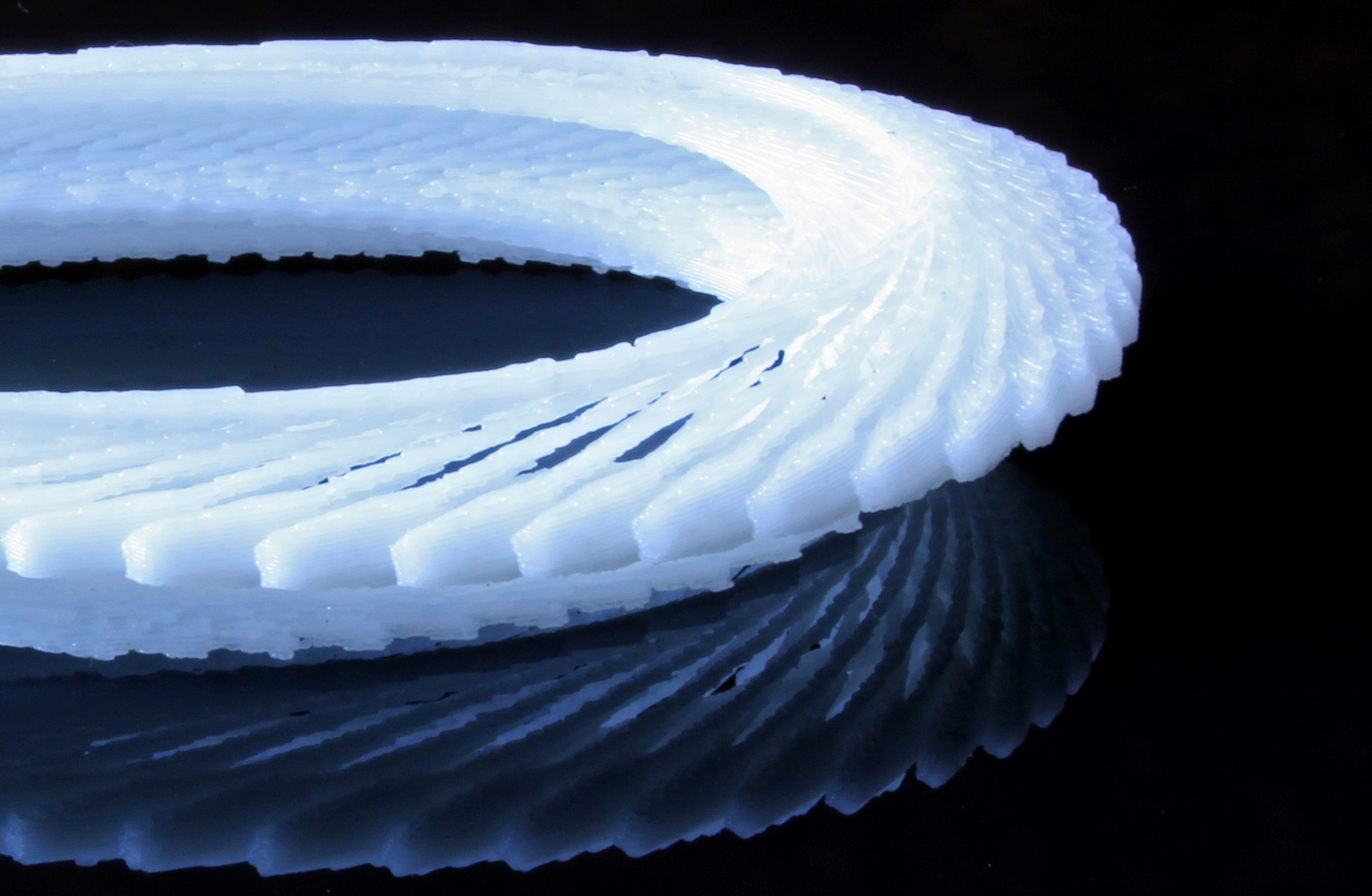
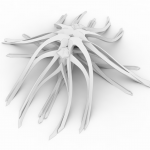
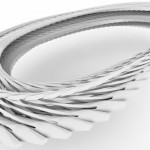
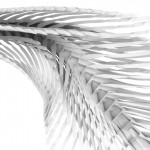
Within the simulated environment the creature can be manipulated for formal, spatial, and gestural variation (below left). Internal parameters (the number of legs and joints per leg) combine with external parameters (such as drag and repulsion forces) to create a high level of control over the creature’s responsiveness and movement through the virtual space. As the creature’s movements are traced through space and time, its familiar squid-like motion aggregates into unexpected, intricate forms (below right). The resulting forms are immediately ready for fabrication, and can be exported to high resolution 3D printers (bottom).
Physical Artifacts Generated:









Additional Digital Artifacts:







*made in java with the help of Processing, Toxiclibs, PeasyCam, and ControlP5